
反省点
何とか動作可能なスマートロックが完成した。しかし使ってみるといくつかの課題が浮上。
- 組み立てた部分が浮きがち
- ドアを開けた際のクリアランスが少ない
- 上記のために時々足がぶつかる
- obniz周りの配線が見えて汚い
組立部分が浮きがちなのは、ねじ止めできる箇所を用意して、固定できるようにしたい。 ずり落ち防止にテグスで扉に引っかけた方式を採用して、テグスで固定させるのもアリだな。
スマートロックとドア間口とのクリアランスの問題は、スマートロックの高さに問題がある。 ドアの錠の上にかぶせる形で回転バーを用意し、その直上にサーボを配置。そのために、錠のつまみの上にいろいろ乗っかる形となり、 全体の高さが高くなっている。 一般に売られているスマートロックはこんな形状ではないので、うまく処理していると思われる。
obnizの配線丸見えは、obnizの配置やサーボやリードスイッチとの配線を考慮しなかったのが原因。 もう少し隠す努力をしなければ。
改善案
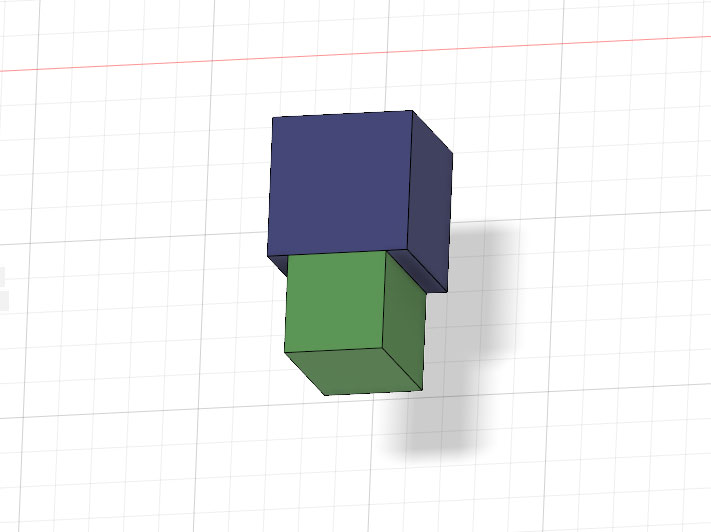
スマートロックの高さ問題は、設計変更で対応できるはず。いろいろと上に乗せるのではなく、 横に並べれば高さは落とせる。
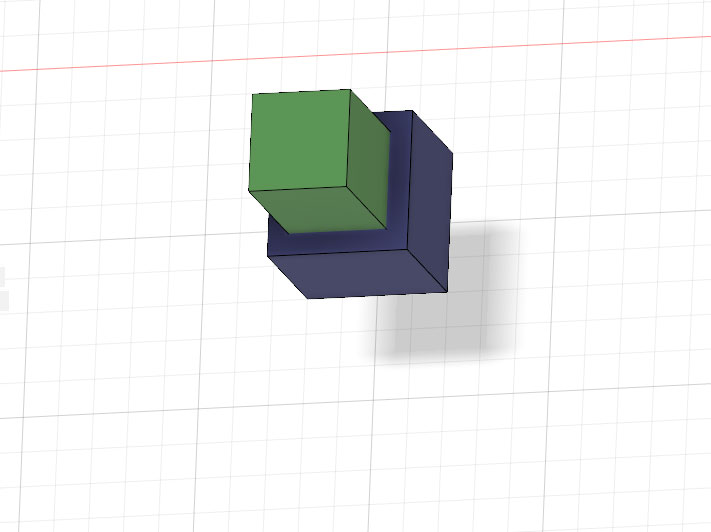
このように、上に乗っかっているのを横に配置すれば、高かった造形物は横に広がるのみだ。 錠のつまみを回す回転バーは配置を変えることは出来ないので、その上に乗っかっているサーボを横に配置することを考えよう。
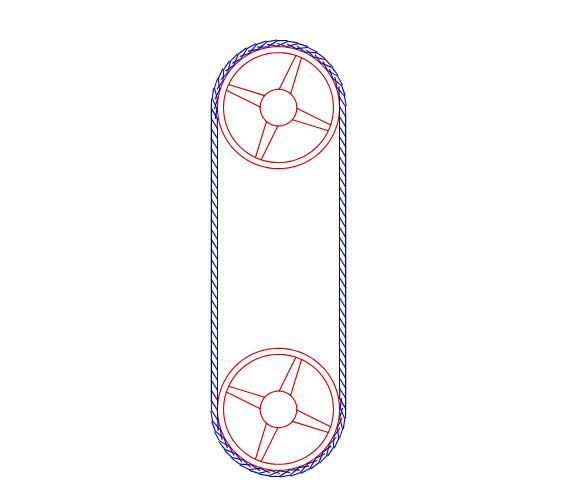
となると、直接つまみを動かす回転バー部分をサーボに直結して回していたが、 横に配置となると、サーボとつないで動かす機構が必要となる。考えられるのは3Dプリンタでも使っているベルトとプーリーなどを使って動かすか、
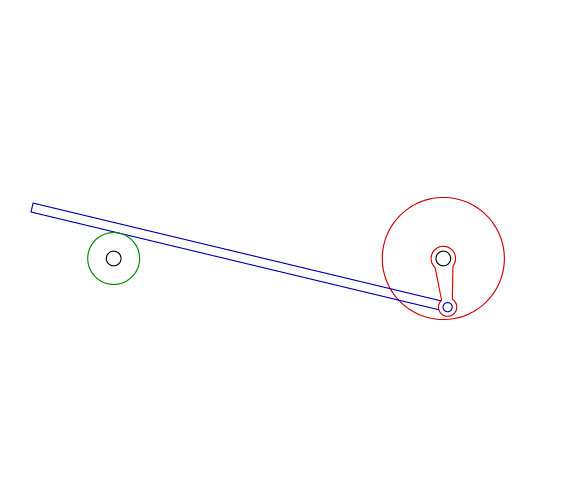
ギアを使って動かすか、
あたりが考えられる。簡単に作れて、問題の起きにくい機構はどれになるかなぁ。
Fusion360の歯車
調べてみると、Fusion360には歯車を作成する機能があるらしい。デフォルト機能には無いのだが、 アドインというものの中に機能が用意されていた。
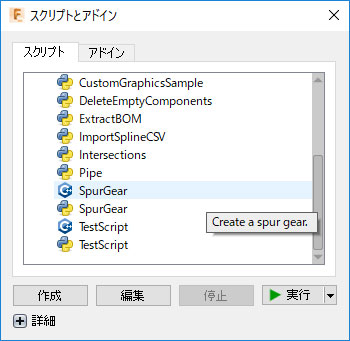
これを使うと、歯車が作成できるようだ。これを使って歯車を作成して、動力伝達をさせるようにしてみよう。 アドインを動かして、適当にパラメータを入れる。というか適当だとうまくできないので、いろいろ調べて以下の設定を実施。
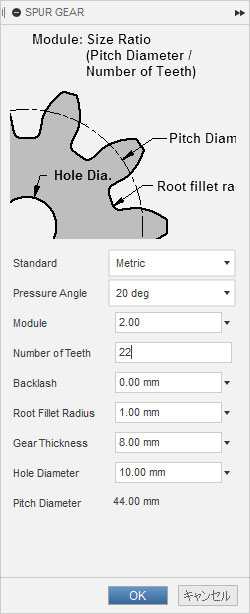
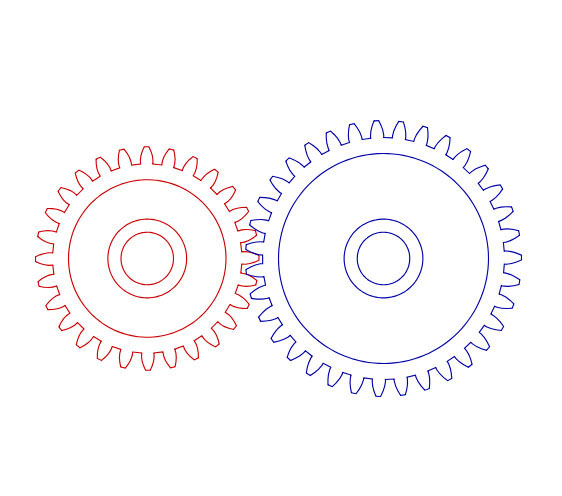
これで、22歯の歯車が完成。サイズも44mmとだいたいいいサイズとなった。歯のへっこんだ側だと直径20mmサイズとなり、 回転させる棒もくっつけることが可能。歯の先端側は直径48mmとなったため、このサイズの動作範囲が必要だ。
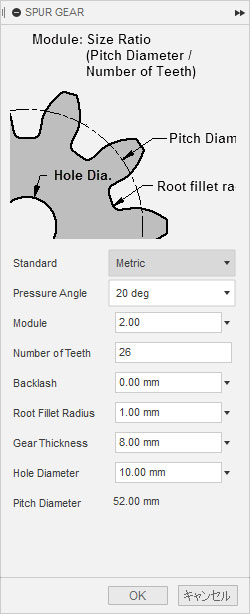
もう一つサーボ側の歯車を作成する。同じのを2つにしようと思ったのだが、そうするとサーボが相手側歯車の回転範囲にぶつかってしまったため、 少しサイズを大きくした。実際には歯数を22⇒26に増やした。これで、52mmサイズの歯車が出来た。
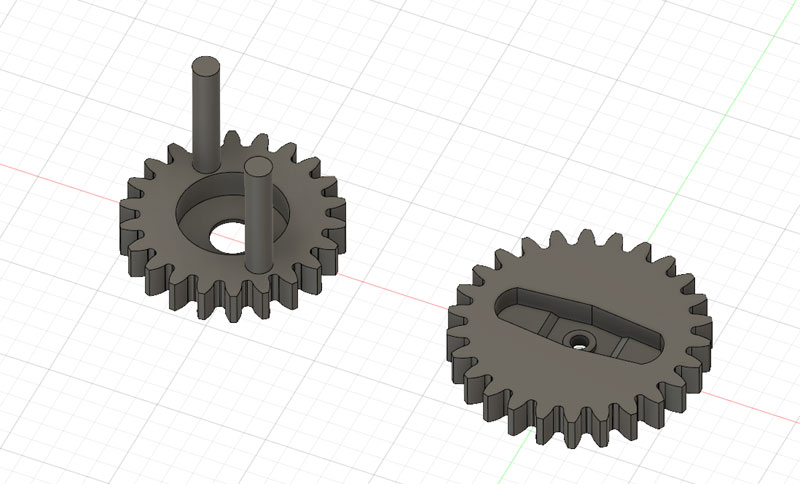
錠のつまみ回転用の歯車には、つまみを動かすための棒をくっつける。また、軸とベアリングをはめ込む穴も真ん中に用意。 そしてサーボ側の歯車にはサーボのアームを格納する場所を掘っておき、ここに埋め込む。きっちりははまらないので、 あとで真ん中をねじ止めする予定。
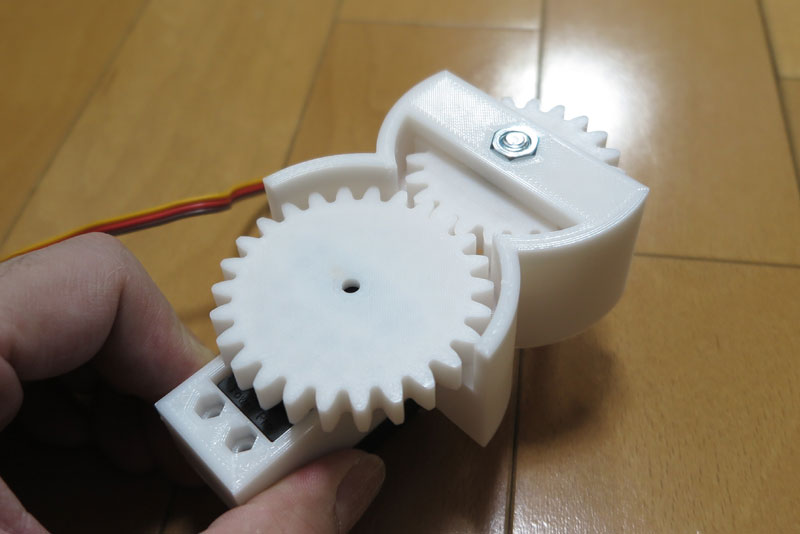
印刷してみると、いい感じの歯車が出来て、簡単にかみ合わせて動かしてみると、しっかりと歯車として動いてくれる。 歯車の歯の形には、いろいろとノウハウがあるようなのだが、簡単に作れて便利。 いや、簡単と書いたが、パラメータについては色々と難しい。 パラメータなどは以下を参考とした。
Fusion 360で歯車作るよー!! 便利で簡単!!
小原歯車工業・技術資料
パラメータの解説を残しておこう。
| 項目 | 説明 |
|---|---|
| standard | 単位をミリ(Metric)かインチ(English)を選択。Metricを選んでおく。 |
| Pressure Angle | 圧力角(α)歯のとんがり具合らしいが20degが妥当らしい。 |
| module | モジュール(m)直径÷歯数で算出されるとのこと。逆に歯数×モジュールが歯車の直径となる。(以下Pitch Diameterに自動表示) |
| Number of Teeth | 歯数。単純に歯車の歯の数。モジュールと合わせて歯車の大きさに影響するので、それなりに重要。 |
| Backlash | 歯のかみ合わせのゆとりとのこと。値を大きくすると歯が細くなった。0.0mmで作ったが問題はなさそう。 |
| Root Fillet Radius | 歯の根元のフィレット(丸くする)具合。根本(歯底)に丸みを持たせるだけのようだ。 |
| Gear Thickness | 厚み。歯車の厚さを設定。厚みがあるとしっかりして強そう。 |
| Hole Diameter | 真ん中の穴の大きさ(直径)。歯車なので何か芯棒が必要で、その穴開けの大きさ。 |
| Pitch Diameter(表示のみ) | 直径。ただし歯の高さの中心位置の直径。 この直径とは歯車の歯の高さの中心円なので、歯先までの直径はこの直径+(モジュール×2)ほど大きい。 |
ということなので、
- 歯の大きさとしてモジュール値を決定(モジュール値×2がだいたいの歯の高さとなる)整数値などわかりやすい値がよさそう。moduleに設定。
- モジュール値から、直径に見合う歯数を決定。(モジュール値2で直径20mmを作るなら、歯数は10)Number of Teethに設定
- 歯車の厚みを設定。Gear Thicknessに設定。
- 真ん中にあける穴の大きさを決定。Hole Diameterに設定。
- 歯底の丸みを設定。モジュール値の半分くらいでよいのでは?Root Fillet Radiusに設定。
- 歯の太さ/歯の隙間を設定。0とか、小さい値でよさそう。Backlashに設定。
すごく簡単に綺麗な歯車が作れるので、今後歯車作るのが楽しくなりそうだ。
つまみ回転部
歯車が出来たのでまずは錠のつまみ回転部分を作る。つまみのカバーはそのままに、前回同様カバーごと棒で押し回す方式。 違うのはサーボ直結から、歯車式になっただけだ。しかし歯車なので回転軸が必要。ここはねじ付きベアリングがあったので、これを使用する。 というか、これを使う前提で歯車も設計した。
このベアリングは真ん中にM6のねじが最初から刺さっており、真ん中箱のねじで固定し、外側がベアリングとして自由回転する。

これをギア付きつまみ回転棒部分と合体させる。
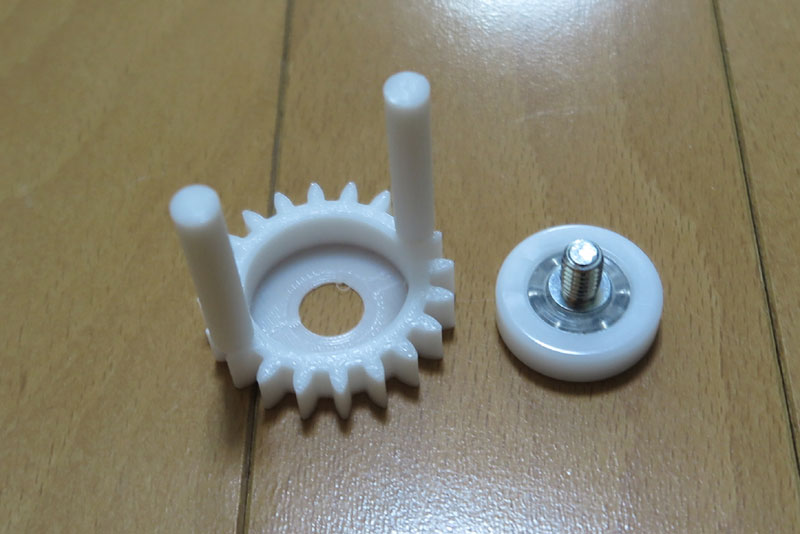
サイズはぴったりで、きつめに押し込むことでハマった。簡単には外れないだろう。 偶然白のフィラメントを使用していたのだが、ベアリングの白と色味は近く、専用品のようだ。

裏側のねじ部分を、上部に固定させればベアリング内蔵のつまみ回転歯車が完成。いい出来上がりだ。

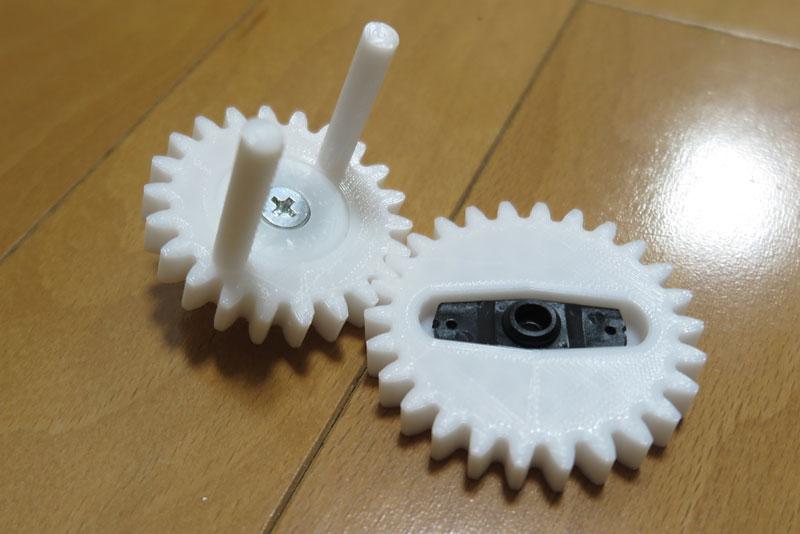
併せて、サーボ接続側の歯車も作成。こちらはサーボホーンを取り付けるようにする。 ぴったりサイズの穴にはできないので、ちょっとぶかぶかの、サーボホーンに合わせたくぼみを作ってある。

このくぼみにサーボホーンを入れるとOK。浮いたりしないようにすれば回転方向の力は歯車にしっかり伝わるはず。 最終的にはねじでサーボに固定して、外れないようにする予定。

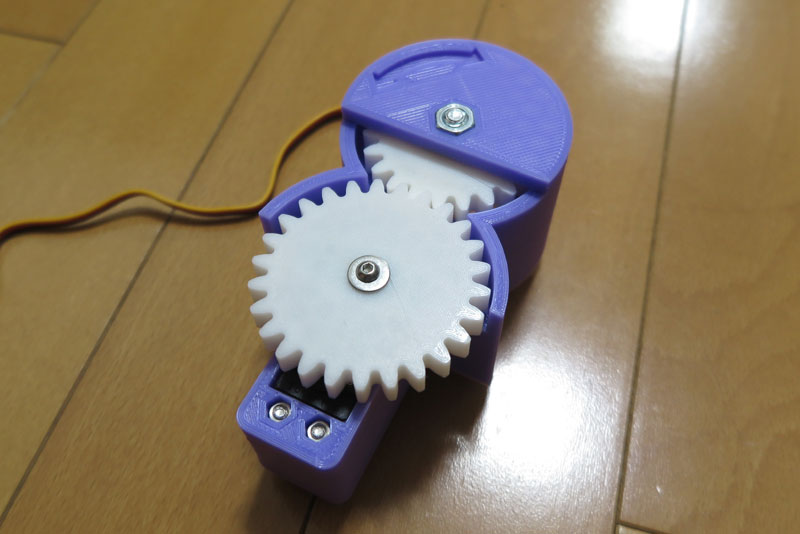
これで、ギア部分の完成。ギアを介すことで、余分な力が逃げることになるが、ベアリングを使用するなど、損失は最小限となっているはず。 しっかり錠を回してくれるといいが。
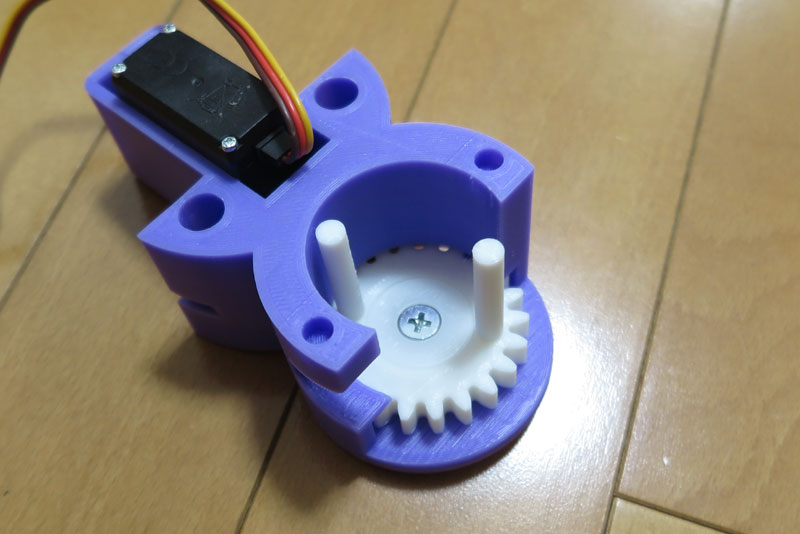
シリンダー部
つまみ回転部を受けるシリンダー部を作成。つまみ回転部を受ける天井部分の作成と、サーボを固定する部分を作成。 つまみ回転部の中心とサーボの回転の中心部を48mm離して設計。これに合わせて各部分を作りこんでいく。 つまみ回転部の天井にはM6のナットを仕込んで留めることが出来る方式とした。 程よい位置に来るよう、ねじを締めこむことで、歯車は周りの壁に当たることなくスムーズに回転した。いい感じだ。
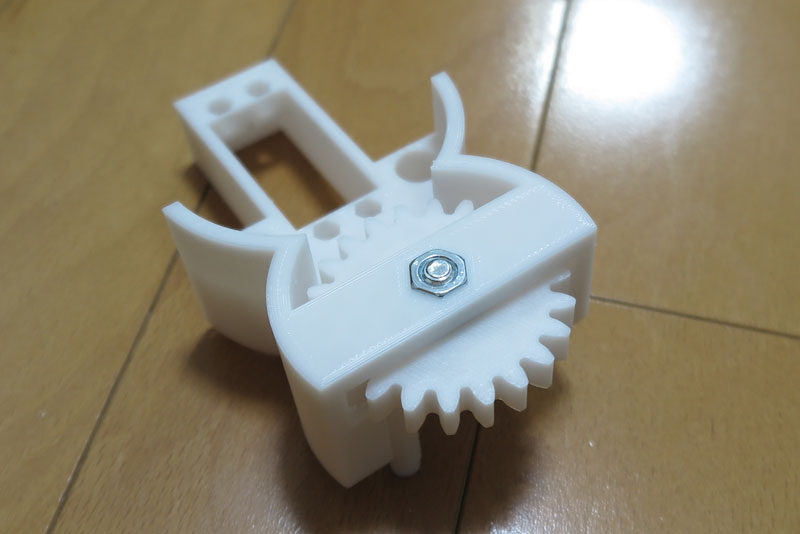
そしてサーボをセット。高さ調整も前回測定済みなので、一発でぴったり。しっかりねじ止めもできて、完璧な固定。

そして、サーボにサーボ側歯車をセットする。うまく歯車がかみ合って、予定通りにいい位置にセット出来た。 サーボが固いので手で歯車を簡単に回すことが出来ないが、サーボテストでサーボを動かしてやると、いい感じに歯車が回り、 つまみ回転部もきれいに連動して回る。予想以上にいい出来栄えの気がする。
土台部分
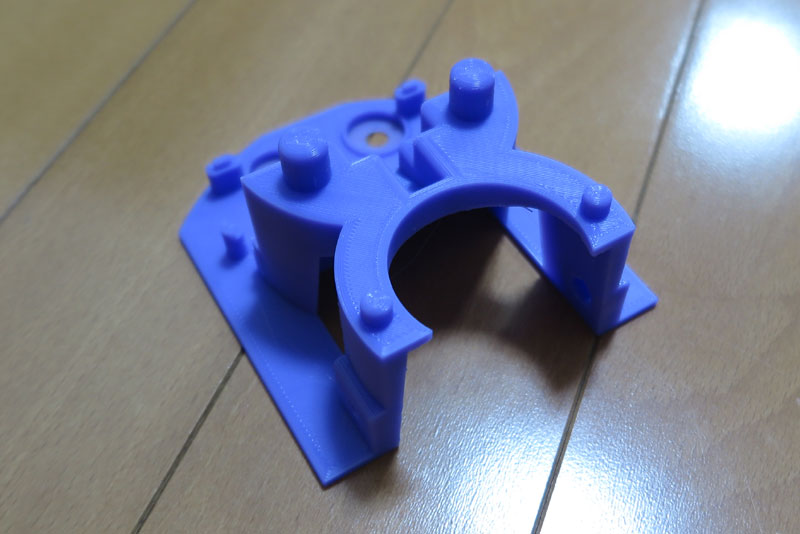
土台部分の作成を行う。前回のものをベースとするが、上に乗るシリンダー部が設計変更となったため、土台部分も少し直す。 とはいえ、玄関錠とのフィット部分は変わらないのでそのまま。シリンダー部との接合部分を少し直す。 また、シリンダー部から一部サーボのお尻が飛び出すので、その部分の受けを作っておく必要がある。これがないとサーボがつっかえてしまう。
併せて今回はobnizの取り付け箇所も検討。つまみ回転部のシリンダーやサーボなどがあり、空いている空間は案外無くて、 土台はこれ以上広げると、玄関錠のほかの部分と干渉するので、これ以上は大きくできない。そこで、何とかサーボの下の空間に配置場所を設定。 扉とくっつけるための磁石の真上になるので、影響を受けないか心配だが、動かしてみて試そう。
ということで、土台部分を試行錯誤しながら設計して出力。
土台の底面部分には、今回も磁石を入れる場所を用意して、玄関扉にしっかりくっつくようにする。 サイズぴったりなので、磁石をねじ込む様に入れるとしっかりハマり込む。これで、それなりに扉に固定されやすくなる。
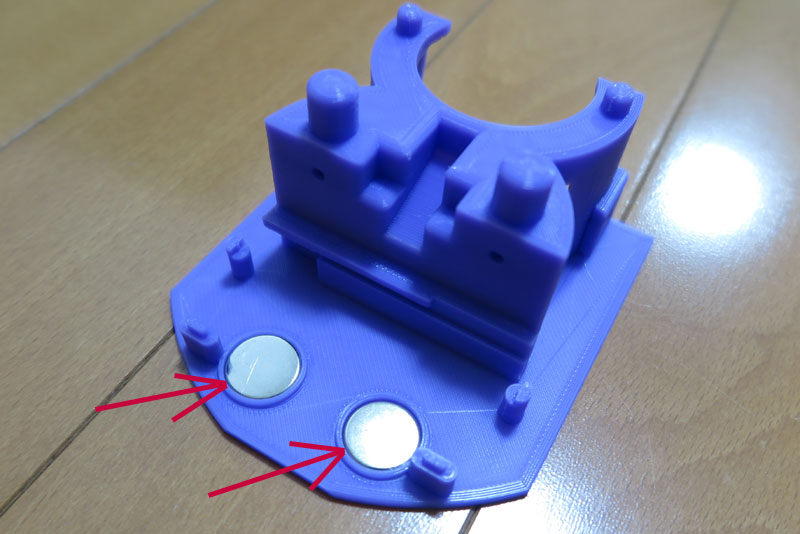
また、横にはナットを仕込んでねじが刺さるようにしておく。これを使ってテグスで玄関錠にしっかり取り付ける。 外れて落ちたりしないようにするための安全帯だ。
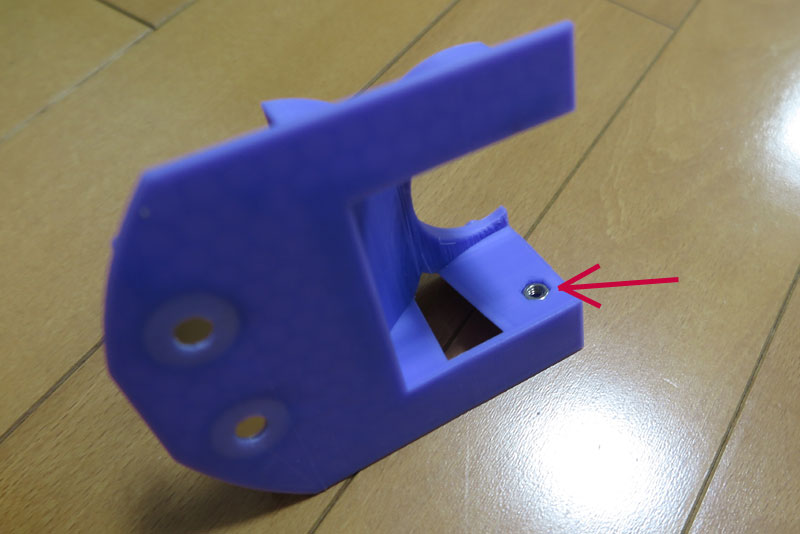
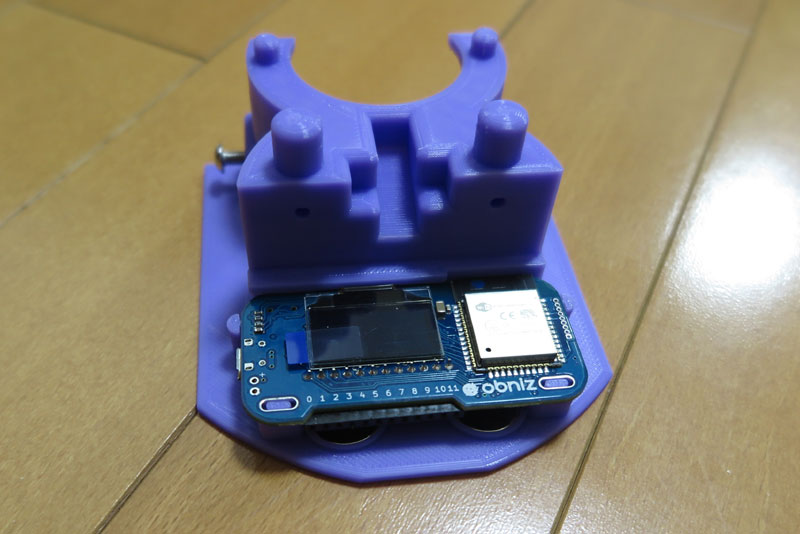
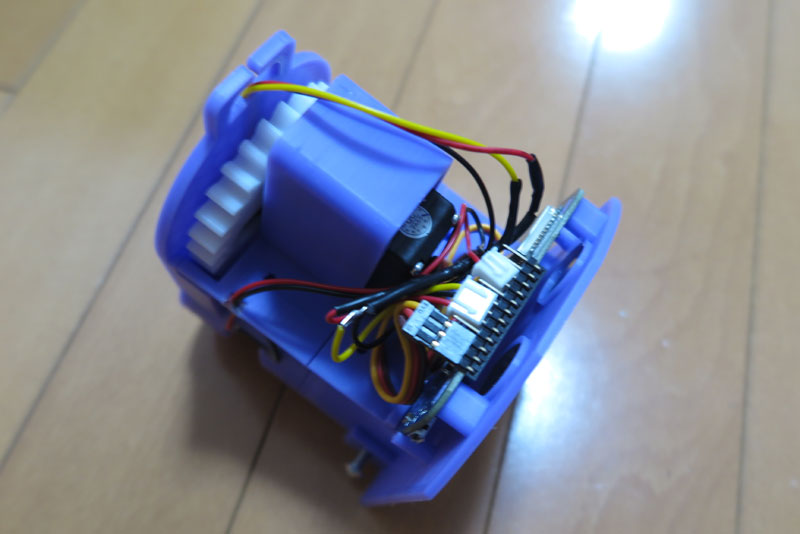
そして、obniz取り付け箇所は、磁石の上。ここに支えの柱を用意。また、土台真ん中部分には受け箇所を用意。 設計上はぴったりのはずなのだが。
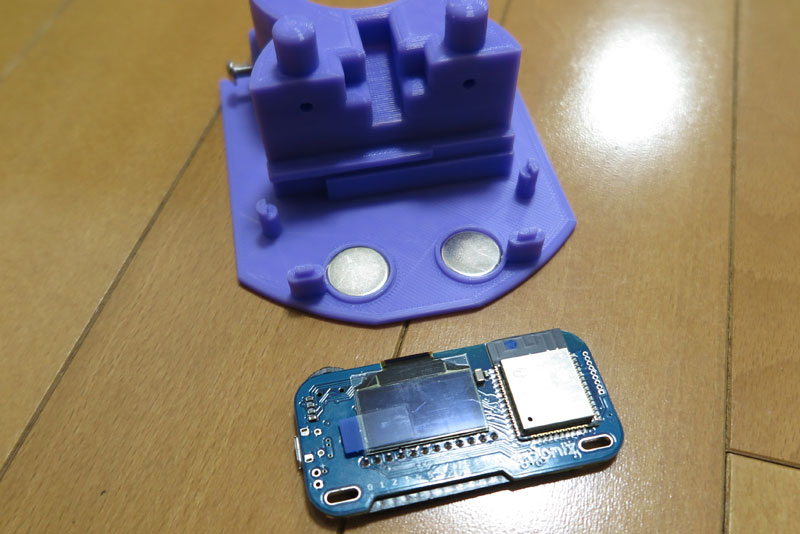
何とかねじ込んで差し込むと、かなりぴったりにハマった。何度か付け外しすると土台側もobniz側も壊れそうなので、 なるべく取り付けたままとしておこう。それなりにいい位置に収まった。
組み上げ
残りの部材としては、トップの蓋の作成。サーボ取り付けのギアが丸出し状態だと、動作時に何か引っかけると危ないので、 蓋を取り付けておく。シリンダー部の形状に合わせて、両脇に引っかけ部分を作り作成。印刷して取り付けてみるといい感じに引っかかったので、 問題なさそうだ。天面のくぼみはLED装着用。
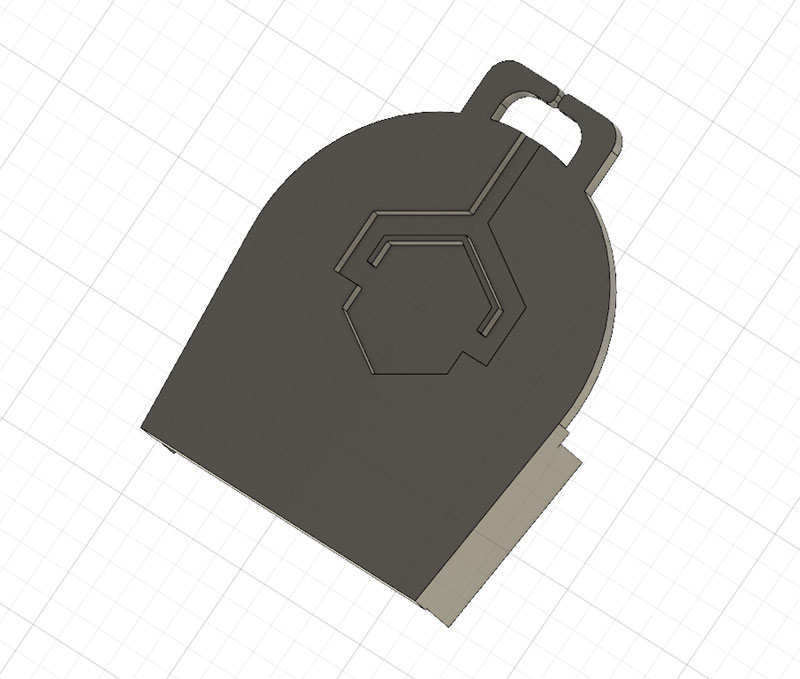
また、錠のつまみ装着部分を少し作り直した。レバーの上に少し何かをつける余裕がありそうなので、 ちょっとした輪っかを取り付けてみた。指が入る大きさではないのだが、錠レバーとして目立たせるのが狙いだ。

では、部材はそろったので、組立開始。最初はシリンダー部にサーボを取り付ける。 サーボがぴったりはまるので、サーボをねじ止めする。ナット埋め込み方式はかなり便利なので今後も活用していこう。

次につまみ回転部を取り付ける。最初にギアのみを差し込み、そのあとベアリングを取り付けないと、うまくはまらない。 ギア部分はシリンダー径より大きいから、横からスライドしないと入らないし、ベアリングにはねじがついているので、 最初から装着していると、引っ掛かってしまうために、スライドして差し込めないのだ。 しかしきちんと取り付ける手順が存在していてよかった。最後にねじでギアの位置を調節。上下に均等な間隔が開くようにしておく。
次はサーボ側のねじの取り付け。サーボはあらかじめ中間位置に回転させて止めておく。ここにサーボホーンを取り付けて、 歯車をはめ込む。最後にM3のねじで固定してやれば、完了。サーボ動作テストで動かしてやり、問題なく軽快に動作するならOKだ。
シリンダー部の横には、リードスイッチを取り付ける。リードスイッチ取り付け用のくぼみが用意されているので、 リードスイッチをこのくぼみの中に入れる。グルーで簡単に固定してやれば完成。リードスイッチはガラス版だと耐久性がないため、 樹脂でガードされたやつとした。
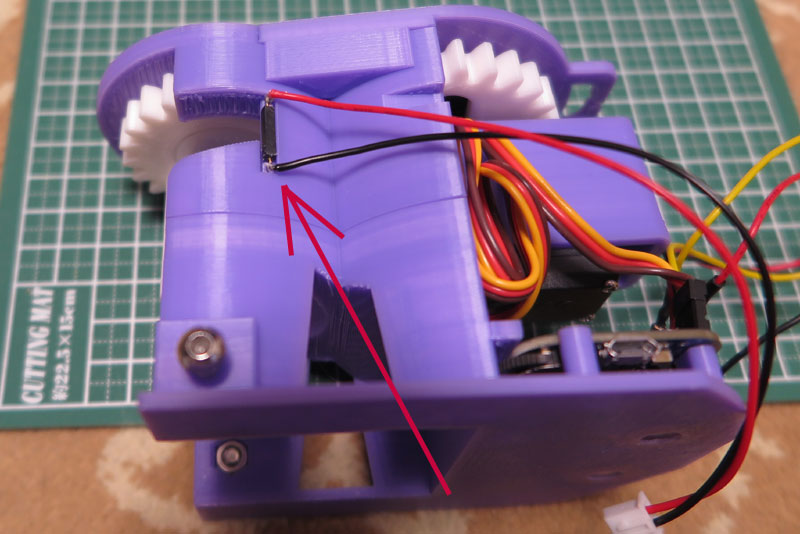
蓋にLEDを取り付けておき、蓋をかぶせる。これで天面から歯車は見えなくなった。横からは歯車に触れてしまうが、 何かがぶつかるケースは無いと思われるので良いだろう。

最後に、配線類をなんとなく処理。相変わらず汚い処理だが、天面の蓋などで案外隠れるので、見た目はひどくは無い。 もう少し隠せられればたぶん問題ないだろう。
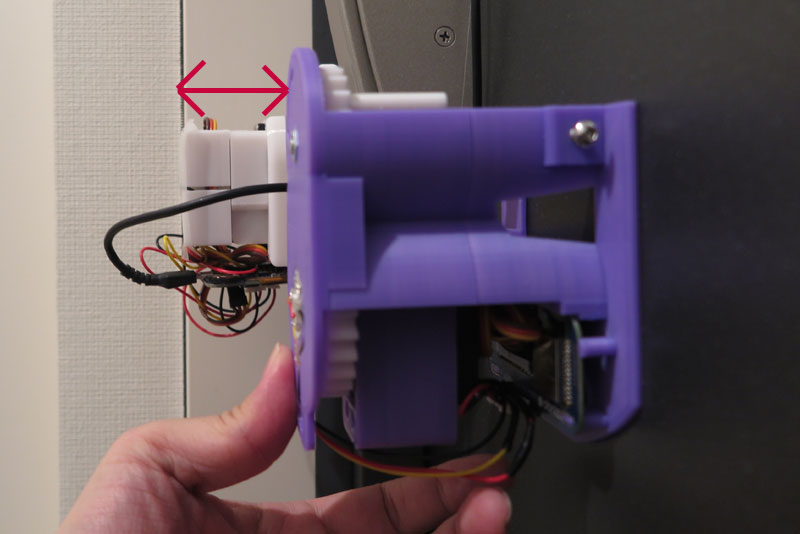
仮完成版のスマートロック2を既存のスマートロックに並べてみる。予定通りサーボが上に乗っかっていた分、背が低くなっている。 とりあえず、低身長版となるスマートロック2が出来上がったようだ。
ギア比
さて、動作検証の前にもう一つ。サーボの配置の関係で、サーボ側の歯車の歯数を増やしたのだが、そうなるとつまみ回転部を 90°回すには、サーボ側は90°回すと回しすぎとなる。
つまみ回転部は22歯なので、90°回転させるには、360÷90=4、22÷4=5.5となり、5.5歯ほど動かせばよい。 変わってサーボ側は、26歯なので、26÷4=6.5となり、6.5歯分回る。つまりサーボ側を90°回すと、つまみ側は1歯分(360÷22=16.4°) ほど、余計に回ることとなる。
では、つまみ側を90°回すにはサーボ側はどれくらい回せばよいかというと、サーボ側で5.5歯回せばよい。サーボ側の1歯は(360÷26=13.85°) なので、13.85×5.5=76.15°回せばよい。誤差含め切り上げて77°回すようにしよう。 現在サーボは通常90°の位置に停止させているので、マイナス方向は13°で、プラス方向は167°までを動作範囲にしておく。

{kind=link}
{kind=link}
{kind=link}
{kind=link}